In this competition project the class was randomly split into groups of two. The groups were tasked with building a robot that had at most two VEX motors, and could roll in one direction, in order to play tug of war. we played a bracket against the other groups, and the winning group would win a slightly better grade, and bragging rights.
My team decided to build a speed oriented robot, so a gear ratio that's less than 1. I almost immediately started building the bot, and didn't ask for very much input from my teammate, a mistake I greatly regret. My teammate gave a few very very good ideas for this project, and they made our robot be able to move correctly. I spent around 2 weeks trying to fix the robot's gear chain, instead of thinking of a new solution. In the last few minutes of construction, he had the idea of using chains so it wouldn't skip on the gears.
My team decided to build a speed oriented robot, so a gear ratio that's less than 1. I almost immediately started building the bot, and didn't ask for very much input from my teammate, a mistake I greatly regret. My teammate gave a few very very good ideas for this project, and they made our robot be able to move correctly. I spent around 2 weeks trying to fix the robot's gear chain, instead of thinking of a new solution. In the last few minutes of construction, he had the idea of using chains so it wouldn't skip on the gears.
Engineering Notebook
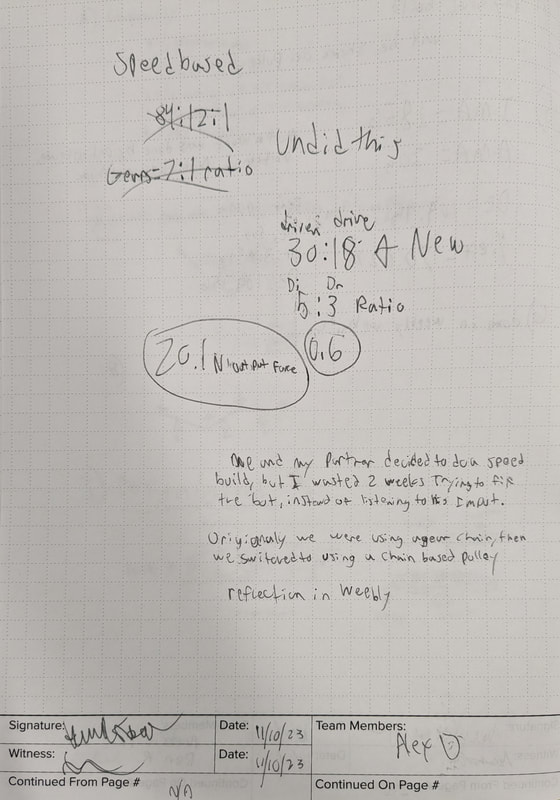
Our bot had a 0.6 gear ratio, from 18:30 teeth count on the sprockets. The bots output force was 20.1 Newtons. We were not required to use the engineering notebook to mark down our whole process, so personally I didn't mark down much at all.
Our bot had a 0.6 gear ratio, from 18:30 teeth count on the sprockets. The bots output force was 20.1 Newtons. We were not required to use the engineering notebook to mark down our whole process, so personally I didn't mark down much at all.